6 Sarah Brown This chapter outlines the phase II designs available for trials where the primary outcome of interest is a joint outcome of both activity and toxicity or where toxicity is assessed alone. Section 6.1 outlines designs that incorporate a control arm, and Section 6.2 outlines those designs with no control arm, both organised by design category and by outcome measure distribution for the activity endpoint. Also, as discussed in Chapter 2, designs are available that address the option of using toxicity alone as the primary outcome measure in a phase II trial. These designs are described in Section 6.3 and may be considered as an add-on to a trial designed to assess activity. Finally, designs that incorporate both activity and toxicity for the purpose of treatment selection, that is, where there are multiple experimental treatments, are presented in Section 6.4. Thall and Cheng (1999) Thall and Cheng outline a randomised controlled design to assess safety and activity as a bivariate variable, quantifying treatment effect as a corresponding two-dimensional parameter. The design considers the acceptable trade-off in toxicity for increases in activity, that is, the acceptable increase in toxicity for a specific increase in activity, and vice versa, and provides a formal comparison of the experimental treatment with control. It is necessary to specify the control activity and toxicity estimates and trade-offs that would be acceptable to warrant the experimental treatment worthy of further investigation; more than one trade-off can be specified. The association between toxicity and activity should also be specified in terms of an odds ratio (OR) between the probability of toxicity when, for example, response occurs, relative to no response, where an OR of 1 implies independence between toxicity and response. The design presented is a one-stage design and is extended to multiple stages in a subsequent paper (Thall and Cheng 2001). Programs are not detailed as being available; however, detail is given to allow implementation, and programs may be available by contacting the authors. Thall and Cheng (1999) Thall and Cheng outline a randomised controlled design to assess safety and activity as a bivariate variable, quantifying treatment effect as a corresponding two-dimensional parameter. The design considers the acceptable trade-off in toxicity for increases in activity, that is, the acceptable increase in toxicity for a specific increase in activity, and vice versa, and provides a formal comparison of the experimental treatment with control. It is necessary to specify the control activity and toxicity estimates and trade-offs that would be acceptable to warrant the experimental treatment worthy of further investigation; more than one trade-off can be specified. The association between toxicity and activity should also be specified. The main body of the paper outlines the design in the context of a binary outcome for activity; however, distribution theory for application with a time-to-event outcome is provided in the appendix to the paper. The design presented is a one-stage design and is extended to multiple stages in a subsequent paper (Thall and Cheng 2001). Programs are not detailed as being available; however, detail is given to allow implementation, and programs may be available by contacting the authors. Thall and Cheng (2001) Thall and Cheng extend the one-stage design outlined in Section 6.1.1 to the two-stage and multi-stage settings (Thall and Cheng 1999). The design considers the acceptable trade-offs in toxicity for increases in activity, that is, the acceptable increase in toxicity for a specific increase in activity, and vice versa, and provides a formal comparison of the experimental treatment with control. It is necessary to specify the control activity and toxicity estimates and trade-offs that would be acceptable to warrant the experimental treatment worthy of further investigation; more than one trade-off can be specified. The association between toxicity and activity should also be specified in terms of an OR between the probability of toxicity when, for example, response occurs, relative to no response, where an OR of 1 implies independence between toxicity and response. Sample size is either minimised under the null hypothesis of no treatment difference in activity and toxicity or the maximum sample size is minimised if the trial continues to a second stage. In the two-stage setting, termination at the end of stage 1 is permitted only for lack of activity or unacceptably high toxicity. The authors also discuss application to the single-arm phase II setting. No software is noted; however, detail is given to allow implementation. Sun et al. (2009) Sun and colleagues propose a randomised two-stage design for activity as the primary outcome of a phase II trial, whereby a sufficiently high response rate or a sufficiently low early progressive disease rate should warrant further investigation of the treatment. This is assessed as a multinomial outcome. As such, the authors note that the design may be extended to studies monitoring safety and efficacy simultaneously. In this setting, the activity outcome may be considered as a binary outcome measure. Optimal and minimax designs are proposed following the methodology of Simon (1989). Differences in response and toxicity rates between control and experimental arms are compared, highlighting that the intention of the phase II trial is to screen for potential efficacy as opposed to identifying statistically significant differences. Decision rules are based on observing a sufficiently high response rate or a sufficiently low toxicity rate. An extension is also proposed to the multi-arm selection setting. Detail is given regarding how to implement the designs in practice, and software is noted as being available by contacting the first author to allow identification of designs. The design recommends a treatment for further investigation when the response rate is sufficiently high or the toxicity rate is sufficiently low. Early termination is permitted for lack of activity or unacceptably high toxicity only. Thall and Cheng (2001) Thall and Cheng extend the one-stage design outlined in Section 6.1.1 to the two-stage and multi-stage setting (Thall and Cheng 1999). The design considers the acceptable trade-offs in toxicity for increases in activity, that is, the acceptable increase in toxicity for a specific increase in activity, and vice versa, and provides a formal comparison of the experimental treatment with control. It is necessary to specify the control activity and toxicity estimates and trade-offs that would be acceptable to warrant the experimental treatment worthy of further investigation; more than one trade-off can be specified. The association between toxicity and activity should also be specified. The example provided by the authors outlines the design in the context of a binary outcome for activity; however, distribution theory provided for the one-stage design may be applied for application in the setting of a time-to-event outcome for activity (Thall and Cheng 1999). In the two-stage setting, termination at the end of stage 1 is permitted only for lack of activity or unacceptably high toxicity. The authors also discuss application to the single-arm phase II setting. No software is noted; however, detail is given to allow implementation. Thall and Cheng (2001) Thall and Cheng extend the one-stage design outlined in Section 6.1.1 to the two-stage and multi-stage setting (Thall and Cheng 1999). The design considers the acceptable trade-offs in toxicity for increases in activity, that is, the acceptable increase in toxicity for a specific increase in activity, and vice versa, and provides a formal comparison of the experimental treatment with control. It is necessary to specify the control activity and toxicity estimates and trade-offs that would be acceptable to warrant the experimental treatment worthy of further investigation; more than one trade-off can be specified. The association between toxicity and activity should also be specified in terms of an OR between the probability of toxicity when, for example, response occurs, relative to no response, where an OR of 1 implies independence between toxicity and response. In the multi-stage setting, termination at each interim assessment is permitted either for rejection of the alternative hypothesis (i.e. unacceptable toxicity or lack of activity) or for rejection of the null hypothesis (i.e. acceptable toxicity and activity). The authors also discuss application to the single-arm phase II setting. No software is noted; however, detail is given to allow implementation. Thall and Cheng (2001) Thall and Cheng extend the one-stage design outlined in Section 6.1.1 to the two-stage and multi-stage setting (Thall and Cheng 1999). The design considers the acceptable trade-offs in toxicity for increases in activity, that is, the acceptable increase in toxicity for a specific increase in activity, and vice versa, and provides a formal comparison of the experimental treatment with control. It is necessary to specify the control activity and toxicity estimates and trade-offs that would be acceptable to warrant the experimental treatment worthy of further investigation; more than one trade-off can be specified. The association between toxicity and activity should also be specified. The example provided by the authors outlines the design in the context of a binary outcome for activity; however, distribution theory provided for the one-stage design may be applied for application in the setting of a time-to-event outcome for activity (Thall and Cheng 1999). In the multi-stage setting, termination at each interim assessment is permitted either for rejection of the alternative hypothesis (i.e. unacceptable toxicity or lack of activity) or for rejection of the null hypothesis (i.e. acceptable toxicity and activity). The authors also discuss application to the single-arm phase II setting. No software is noted; however, detail is given to allow implementation. Conaway and Petroni (1995) Conaway and Petroni propose a single-arm, bivariate outcome design for use when the sample size is limited to a small number of patients. The design considers both response and toxicity (both binary variables) and may be one-stage, two-stage or multi-stage. Estimation of the association between the activity and toxicity outcomes is required, for example, in the form of the correlation or an OR between the probability of toxicity when, for example, response occurs, relative to no response, where an OR of 1 implies independence between toxicity and response. The authors note that the design, with respect to power, is robust against misspecification of this association parameter. Sample sizes and cut-off points are calculated via iteration to satisfy the error criteria, and generally group sizes of fewer than 10 are not considered. Programs to enable implementation are noted as being available from the authors. Conaway and Petroni (1996) Conaway and Petroni propose a single-stage (and a two-stage) design for a single-arm trial in which both toxicity and activity (with reference to a response outcome) are incorporated. A trade-off between the two outcomes, that is, the acceptable increase in toxicity for a specific increase in activity, and vice versa, is incorporated based on the I-divergence test statistic. Four outcomes are assumed (active/not toxic; active/toxic; not active/toxic; not active/not toxic). The minimum response rate acceptable if there were no toxicities and the maximum toxicity rate acceptable if there was 100% response are required to be specified, as well as the OR for the dependence between the two outcomes, that is, the probability of toxicity when response occurs, relative to no response, where an OR of 1 implies independence between toxicity and response. To determine the total sample sizes and the cut-off boundaries iteration is required, where the cut-offs are based on the I-divergence test statistic. The authors recommend that, in practice, several values of the OR be investigated to assess the sensitivity of the design to misspecification in each setting. The authors note that the properties of the design are generally unaffected by misspecification. This design differs from their previous design (Conaway and Petroni 1995) which bases results on the overall activity and toxicity rates, as opposed to considering the four outcomes described above. Programs are not noted as being available from the authors; therefore, the design may need programming for implementation. Jin (2007) Jin considers a single-stage design incorporating both activity and toxicity as binary outcome measures, with extension to the two-stage setting. The design allows a trade-off between toxicity and activity by controlling the marginal type I errors for these two outcomes separately. Incorporating this additional control inevitably increases sample size. There are four potential outcomes: active/not toxic; active/toxic; not active/toxic; not active/not toxic which are summarised by means of specification of the overall response rate and overall toxicity rate, as well as the OR representing the association between the two, that is, the probability of toxicity when response occurs, relative to no response, where an OR of 1 implies independence between toxicity and response. The design is noted to be robust against misspecification of this OR. This design would need programming to enable implementation. Bryant and Day (1995)
Designs incorporating toxicity as a primary outcome
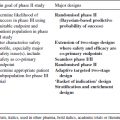
6.1 Including a control arm
6.1.1 One-stage designs
6.1.1.1 Binary outcome measure
6.1.1.2 Time-to-event outcome measure
6.1.2 Two-stage designs
6.1.2.1 Binary outcome measure
6.1.2.2 Time-to-event outcome measure
6.1.3 Multi-stage designs
6.1.3.1 Binary outcome measure
6.1.3.2 Time-to-event outcome measure
6.2 Not including a control arm
6.2.1 One-stage designs
6.2.1.1 Binary outcome measure
6.2.2 Two-stage designs
6.2.2.1 Binary outcome measure
Related posts:



Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


